

| autor | zpráva |
|
-mio- modelár 
Příspěvků: 292 Moje modely Poslat zprávu |
Ako som pochopil, je to skor taky "taranis light". Urcite nic pre tych co uz Taranisa x9d maju. |
|
Thinky modelár 
Příspěvků: 1008 Moje modely Poslat zprávu |
novy FW pre Kiss FC s notch filtrom na odstranenie propwash a nechcenych oscilacii a rezonacii vrtul.. a VTX config featureou https://www.rcgroups.com/forums/showpost.php?p=36424031&postcount=16474 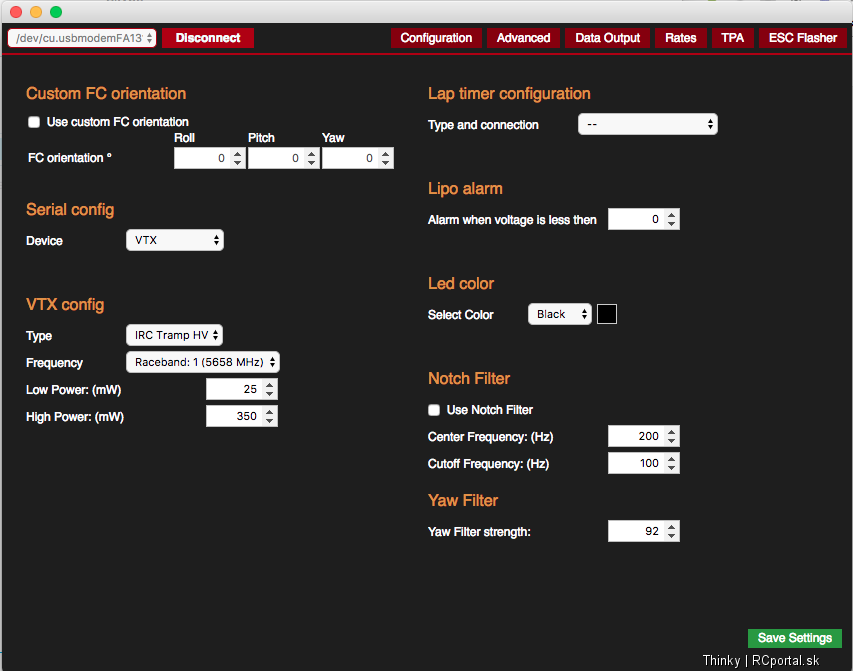 |
|
Hronecml modelár 
Příspěvků: 95 Moje modely Poslat zprávu |
Dnes mi prišlo vtx tbs unify pro hv a po pripojení sú cez obraz vertikálne čiary...na druhom vtx vse ok neviete čo by to mohlo spôsobovať alebo pokazený kus?  |
|
Hunter88 modelár 
Příspěvků: 99 Moje modely Poslat zprávu |
Hmm zaujimavé vypadá to ako námraza |
|
Hronecml modelár
Příspěvků: 95 Moje modely Poslat zprávu |
Je to len na baterke doma nie v quade |
|
airacutie modelár 
Příspěvků: 266 Moje modely Poslat zprávu |
Nemas tam naladeny vedlajsi kanal? |
|
Norberto modelár 
Příspěvků: 228 Moje modely Poslat zprávu |
Neviete niekto podla čoho mám nastaviť Motor PWM frequency 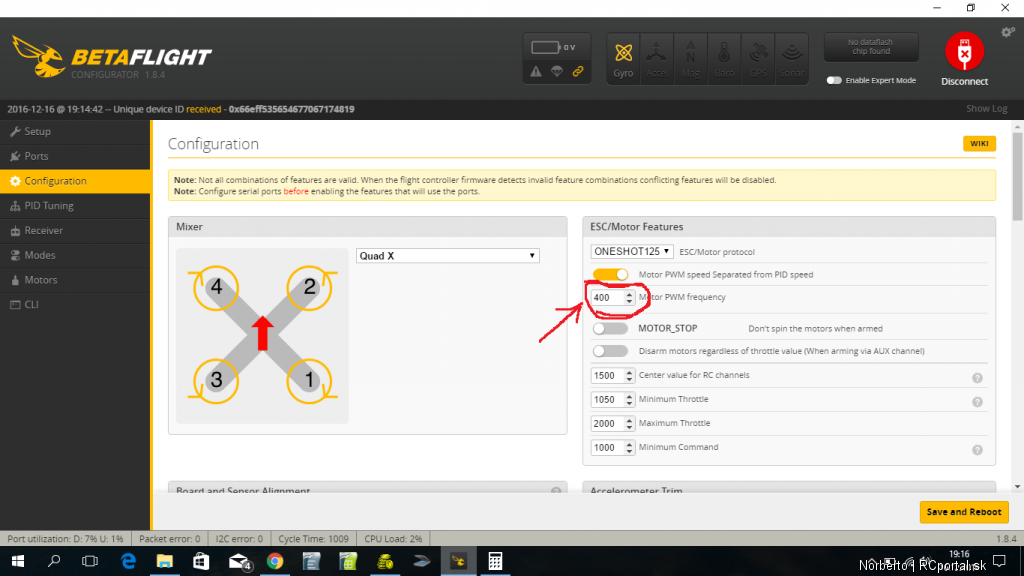 |
|
Dzino modelár 
Příspěvků: 352 Moje modely Poslat zprávu |
Tu je pekne video o tom: https://www.youtube.com/watch?v=WFFmE1EhuP0&t=2s V podstate ked to mas zapnute tak si zapol asynchronne posielanie udajov do ESC. Ked to mas nastavene na synchronne, tak pri kazdom PID loope Flight Controller povie ESC ake maju byt otacky. Cize ak mas PID loop nastaveny na 2kHz, tak do ESC ide 2000 krat za sekundu update. Ked mas PID loop 4kHz, tak 4000 krat za sekundu atd... Ked zapnes asynchronne posielanie udajov, tak nezavisle od PID loop sa bude posielat update na ESC. Napriklad ak mas PID loop 2kHz a Motor PWM frequency na 4kHz (2x vyssiu), tak PID vypocita hodnotu pre ESC a odovzda na posielanie do ESC. Separatny proces zacne posielat hodnoty do ESC. Kedze posielanie na 2x vyssej frekvencii nez vypocet, tak sa opakuje ta ista hodnota vystupu viackrat - pokial PID loop nevypocita novu a potom sa posiela nova hodnota nastavenou frekvenciou. Hodnota Motor PWM frequency zavisi od ESC ktore mas, ze kolko znesu. Ked mas ESC s BLHELI_S a Multishoot, tak to moze ist max na 32k. Len pri tejto maximalnej frekvencii sa moze stat ze ESC namiesto riadenia motorov bude iba pocuvat aka hodnota prichadza. Podla toho chlapika je rozumna hodnota 8kHz. Na screensote vidim, ze mas nastavene Oneshoot125 - cize nejake starsie ESC. Tam by som neodporucal dat viac nez 4kHz. Pre DSHOT to asi nema vyznam. Dal som otazku k tomu videu, nedostal som uplne jasnu odpoved. |
|
JiriF modelár 
Příspěvků: 184 Moje modely Poslat zprávu |
Dolezite je posielat hodnotu vypocitnanu v PID co najskor ako je k dizpoziciii, preto vlastne vznikol oneshot ktory to dokazal oproti klasickemu pwm synchronne a o to ide. Ten parameter vypni, nic neriesi len komplikuje. Cycle time mas 1000ms co oneshot125 v pohode zvladne  Tu je kvalitne porovnanie aktualnych esc protokolov https://oscarliang.com/dshot/ ktore mnohe objasni. Tu je kvalitne porovnanie aktualnych esc protokolov https://oscarliang.com/dshot/ ktore mnohe objasni. |
|
Norberto modelár
Příspěvků: 228 Moje modely Poslat zprávu |
Ako vypnem asynchronne ? |
|
JiriF modelár
Příspěvků: 184 Moje modely Poslat zprávu |
vypnes to zaklikavatko "motor pwm speed separated ...." |
|
Norberto modelár
Příspěvků: 228 Moje modely Poslat zprávu |
Ale potom mi nenjde koptera. |
|
Dzino modelár
Příspěvků: 352 Moje modely Poslat zprávu |
No ono su vseliake teorie, ze preco to zapnut - nie je to take jednoznacne ako pises: 1. Ak sa pouziva asynchronne posielanie PWM, tak sa o par percent znizi utilizacia procesora, lebo posielanie sa odovzda inemu procesu. Cize ak ides s PID loopom na hranu, tak Ti toto moze znizit vypadky pri moznej 100% 2. Pokial nemas DSHOT, tak prenost udajov je "analogovy" ESC pocita pulzov a aj ked Flight Controller posiela 1500, tak ESC moze raz precitat 1501 inokedy 1498 atd. Ked posielas viacero vzoriek, tak je vacsia sanca, ze merania sa zpriemeruju a ESC dostane taku hodnotu ako Flight Controller posiela Ty tvrdis, ze treba mat nastavene na synchronne. Ale ked mas F1/F3 procesor, tak PID loop vies nastavit na vyrazne mensiu hodnotu nez ESC dokaze citat. Cize ak je frekvencia updatu ESC vyssia, tak Flight opakuje tu istu hodnotu viackrat. Cize Tvoje odovodnenie neobstoji... |
|
Norberto modelár
Příspěvků: 228 Moje modely Poslat zprávu |
mám rx paraller PWM . |
|
Dzino modelár
Příspěvků: 352 Moje modely Poslat zprávu |
rx paraller PWM - to je nieco uplne ineho... To je prepojenie medzi prijimacom a Flight Controllerom. To je uplne ina zalozka nez o ktorej hovorime |

- Odpovědět
Musíte byť prihlásený na pridávanie príspevkov.