

| autor | zpráva |
|
galansky modelár 
Příspěvků: 192 Moje modely Poslat zprávu |
Peter nenechame to radsej na zajtra?u nas prsi uz hodinu.zajtra ma byt pekne.ci? |
|
peter1207 modelár 
Příspěvků: 313 Moje modely Poslat zprávu |
Zajtra ma menej fukat ale aj dnes sa to okolo 15:00-16:00 ma ukludnit a prsat by malo az od 20:00 az do zajtra skoreho rana. Potom vyjasnenie a malo by byt prevazne jasno az polooblacno bez zrazok. Vietor to iste ako dnes vsak v tt fuka furt. Ak ale chcete zajtrajsok tak navrhujem skor okolo 12:00-13:00 |
|
galansky modelár
Příspěvků: 192 Moje modely Poslat zprávu |
Suhlasim s tym zajtrajskom.vyrazim z beluse okolo 12 a tak okolo jednej budem hadam na mieste. |
|
peter1207 modelár
Příspěvků: 313 Moje modely Poslat zprávu |
Oukej, dufam ze teda aj ostatni pridu  Kazdopadne sa to tu celkom pekne vycasilo A tu su moje nastavenia ak by to niekoho zaujimalo-pomohlo mu: 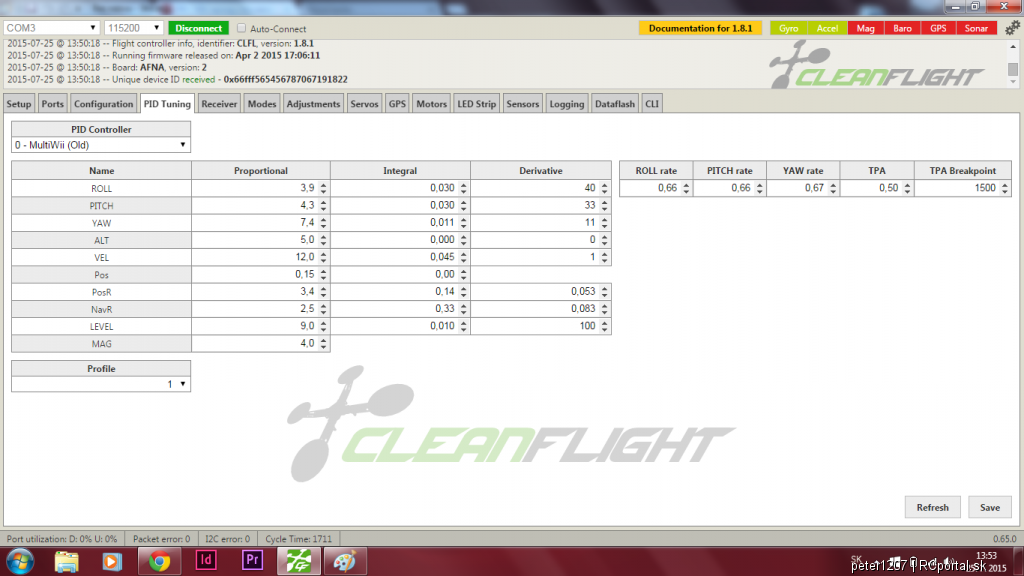 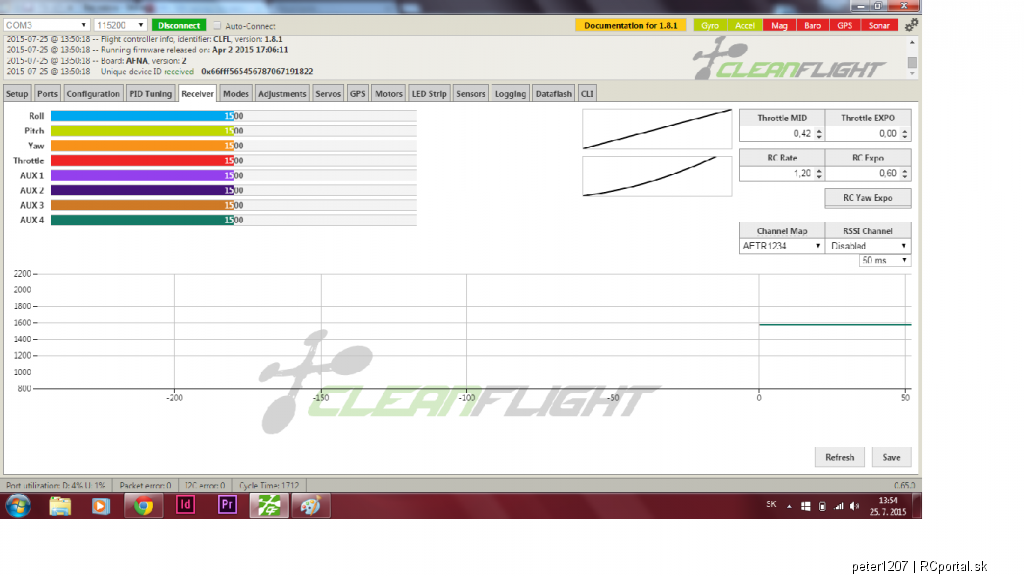 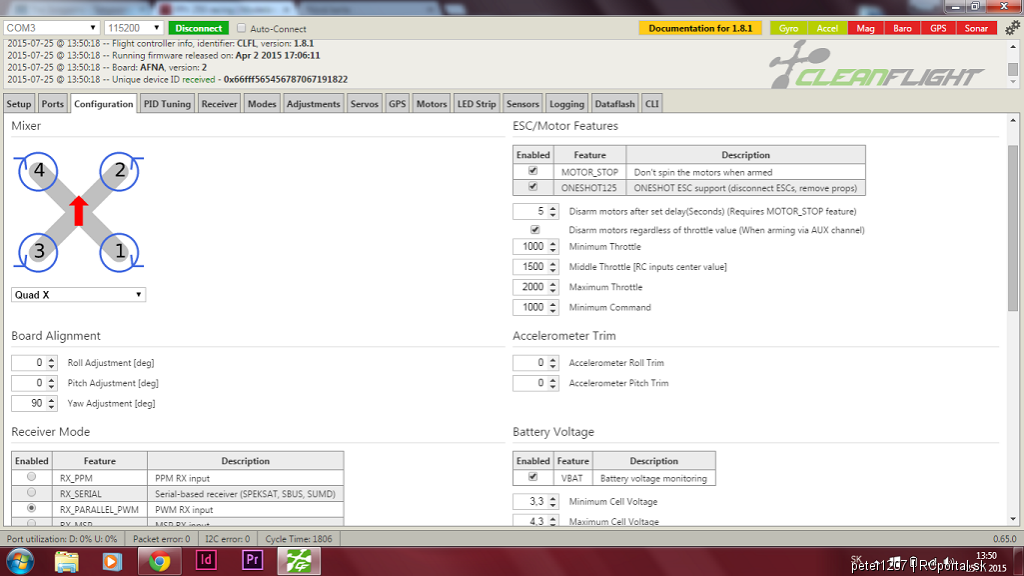 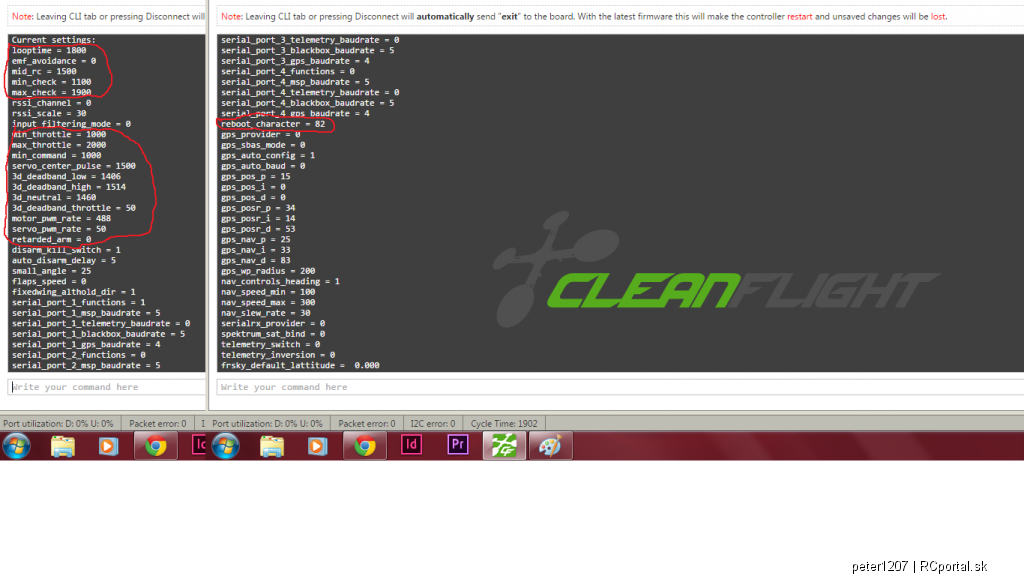 |
|
Jameson modelár 
Příspěvků: 221 Moje modely Poslat zprávu |
Čiže zajtra (nedeľa, 26. 7.) o 13:00 na 48°24'09.0"N 17°36'25.4"E? Nechcem sa sľúbiť, ale ak mi to vydá, rád by som došiel pozrieť... |
|
peter1207 modelár
Příspěvků: 313 Moje modely Poslat zprávu |
Ano Jameson ako pises A opytam sa znalejsich, v com je frsky lepsi nez ostatne tieto veci teda moduly a prijimace a ci su nejake aj pre hitec? |
|
triki modelár Příspěvků: 43 Moje modely Poslat zprávu |
thinkpad - ja lietam D4R-II cez PPM to ma 8 kanalov, male a lahke... treba ale nahodit 27ms fix ak chces pouzivat viac ako 6 kanalov... edit: d4r-II http://www.modelarstvoimi.sk/prijimac-frsky-d4r-ii-accst-telemetria-d-4-kanal/produkt/6369/394 27ms fix explained http://diydrones.com/profiles/blogs/frsky-s-cppm-at-27msec-firmware-update-with-ft-prog-and-ftdi-cabl bral som z IMI aj taranisa aj prijimac s najnovsim fw ad. PID tuning - toto je fajn clanok, co vysvetli vela zakladnych veci - velmi mi pomohol pochopit ako sa co sprava. http://open-txu.org/home/special-interests/multirotor/cleanflight-pid-tuning/ PID popis, jednotlive PID Controllers a ich vlastnosti https://github.com/joshuabardwell/cleanflight/blob/pid-documentation-update/docs/PID tuning.md Prve lety ma stali bohuzial skor vrtule, nez nejaky let - takze to vidim na dlhsiu cestu... |
|
triki modelár Příspěvků: 43 Moje modely Poslat zprávu |
matolowa - akurat cakam na prevodnik - ked pride, budem robit ten update, dam vediet ako to dopadlo... |
|
Thinky modelár 
Příspěvků: 1008 Moje modely Poslat zprávu |
matolowa hej hej tiez som vygooglil ze ten co som chcel najprv tak nefunguje na PPM  neviem ci ta D8R neni trosku velka skorej by som zobral tu D4R-II.. inac ladim si ten CF a copter mi otaca okolo vlasnej osi do lava cim by som to mohol vystredit aby sa neotacal? hodnotou I? a dalsia vec looptime mate na 1500 alebo 2500? ja som mal pri 1500 rychlejsie reakcie ako pri 2500.. neviem ci ta D8R neni trosku velka skorej by som zobral tu D4R-II.. inac ladim si ten CF a copter mi otaca okolo vlasnej osi do lava cim by som to mohol vystredit aby sa neotacal? hodnotou I? a dalsia vec looptime mate na 1500 alebo 2500? ja som mal pri 1500 rychlejsie reakcie ako pri 2500..triki prfektny clanok o PID diky! snad sa mi podari to dat nejako dokopy |
|
Thinky modelár
Příspěvků: 1008 Moje modely Poslat zprávu |
trochu som sa snazil preloziť nieco o PID controlleroch.. opravte ma ak som nieco nespravne napísal.. PID controller 0 je predvolený controller v Cleanflight, a predvolené nastavenia sú naladené na strednú cestu. Pochádza z MultiWii 2.2 a starších. Jeden z vtipov s týmto PIDom je, že ak zvýšite hodnotu P pre os maximálnej rýchlosti otáčania, tak pre túto os sú znížené. Preto je potrebné nahodiť PITCH alebo ROLL hodnoty ak máte vyššie hodnoty P. V HORIZONT a ANGLE režimoch, tento controller používa úroveň "P" a "I" s cieľom doladiť auto-vyrovnávnie podobným spôsobom, ako “P” a “I” ktoré sú aplikované na ROLL a YAW v ACRO režime. "D" termín je používaný ako obmedzovač limitu úrovne "P" Tento controller je najstarší, najhoršie sa ladí a používa ho najmenej ľudí. PID controller 1, "Rewrite" PID 1 je novší PID regulátor, ktorý je odvodený od MultiWii 2,3 a novších. Funguje lepšie a opravuje niektoré podstatné problémy v tom, ako pracoval starý PID 0. Tuning je ľahší a prináša širší rozsah hodnôt PID. Na rozdiel od PID 0, PID 1 umožňuje užívateľovi naladiť reakcie a stabilitu bez ovplyvnenia YAW, ROLL alebo PITCH hodnôt rotácie (tie sú vyladené podla vyhradených ROLL PITCH a YAW hodnôt). V režime ANGLE, používa "P" ktorý rozhoduje o tom, aká silná korekcia auto-vyrovnávania by mala byť. Všimnite si, že predvolená hodnota pre P je 90. Je viac ako pravdepodobné, že táto príliš vysoká hodnota pre väčšinu modelov spôsobí to, že budú veľmi nestabilné v režime ANGLE, čo môže viesť k strate kontroly. V režime Angle sa odporúča zmeniť túto hodnotu na 20 pred použitím tohto PID controllera. V režime HORIZON, používa "I" ktorý rozhoduje, koľko auto-vyrovnávania by malo byť použitého. I termín znamená teda silu auto-vyrovnávania. Hodnota 0,030 je rovná 3,0 pre stupeň P. "D" termín zasa znamená silu horizontalnej zmeny. Hodnota 0 viac vyrovnáva a hodnota 255 je zasa lepšia pre RATE mód, čiže nevyrovnáva. PID controller 2, "LuxFloat" PID Controller 2 je nový PID regulátor. Jedná sa o prvý PID navrhnutý pre 32-bitové procesory a neodvodené z MultiWii. PID 0 a 1 používajú celočíselnú aritmetiku, ktorá bola rýchlejšia v časoch pomalších 8-bitových MultiWii procesorov, ale je menej presná. Tento PID má kód, ktorý sa pokúša kompenzovať kolísanie looptime, čo by malo znamenať, že PID nemusia byť prenastavované pri zmene looptime. Spočiatku tam boli nejaké problémy s režime HORIZON, a pomalosť v ACRO režime, ktoré boli opravené vo verzi nebbian 1.6.0. Funkcia automatického ladenia NEFUNGUJE v tomto PIDe, takže sa o AUTOTUNE nemusíte vobec snažiť. Silu auto-vyrovnávania modelu v režime ANGLE je potrebné nastaviť parametrom "level_angle", ktorý je označený “LEVEL Proportional”. Toto sa používa na auto-vyrovnánie sily v režime ANGLE v porovnaní s režimom HORIZON. Predvolená hodnota je 5,0. Sila auto-vyrovnávania pre režim HORIZON sa nastavuje parametrom "level_horizon", ktorý je označený "LEVEL Integral". Predvolená hodnota je 3,0 čo v režime HORIZON robí slabšie samo-vyrovnávanie než v režime ANGLE. Poznámka: V súčasnej dobe je chyba v konfigurátore, ktorý ukazuje tento parameter deleno 100 (čiže to ukazuje 0,03 namiesto 3,0). Prechod medzi samo-vyrovnaním a ACRO správaním v režime HORIZON je riadený parametrom "sensitivity_horizon", ktorý je označený "LEVEL Derivate”. Týmto sa nastaví percento páky, v ktorych miestach by malo mať samo-vyrovnávanie modelu, čiže menšie hodnoty spôsobia väčšie ovládanie páky pre lietanie iba pomocou gyra. Predvolená hodnota je 75% Napríklad pri nastavení hodnoty "100" pre "sensitivity_horizon", 100% samo-vyrovnávaciej sily bude aplikovanej na stred páky, 50% samo-vyrovnávaciej sily bude aplikovanej na 50% páky, a na 100% páky nebude použitá žiadna vyrovnávacia sila. Ak sa citlivosť zníži na “75”, bude 100% samo-vyrovnávacia sila aplikovaná na stred páky, 50% samo-vyrovnávacej sily bude aplikovaná na 63% páky, a na 75% a viac páky nebude aplikovaná žiadna samo-vyrovnávacia sila. PID controller 3, "MultiWii23" PID 3 je priamy port z MultiWii 2.3 a novšieho. Algoritmus manipulácie pre ROLL a PITCH je iný ako pre YAW. Užívatelia s problémami YAW by mali skúsiť tento PID. Zameriava sa na gyro a je odstránené ešte viacej zatáčanie YAW. Takže poskytne najlepší výkon pre veľmi malé coptery zo striedavými motormi. ..s toho vyplýva ze treba sa pustit do ladenia PID 2 alebo 3 |
|
peter1207 modelár
Příspěvků: 313 Moje modely Poslat zprávu |
Tesi ma ze sa to tu trosku rozvija a riesia sa aj taketo veci. Ale charpu lieta pid controller 1, ja ho lietam tiez a mnoho dalsich ludi takisto. A nikto sa zatial nestazoval...ako poison hovorieva, netreba sa v tom šprtať, treba lietať  |
|
triki modelár Příspěvků: 43 Moje modely Poslat zprávu |
k tym PID Poll na flitetesthttp://forum.flitetest.com/showthread.php?16762-Cleanflight-What-s-your-favorite-PID-controller vykopiroval som hlavnu info - porovnanie PID 0 Horrible, terrible, useless and every other bad word I can utter right now. Roll/pitch rate and yaw rate are coupled to the PID's which makes you want to slit your wrist every time you try to tune. PID 1 Very locked in but has a robotic feel about it. No coupling, no use of TPA. Much improved yaw. PID 2 Crazy good fun for acro type flying and snappy yaw but not as locked in and has I gain issues. Also not so good in wind because of this. No coupling and no use of TPA. Extremely snappy yaw. Can have a high freq oscillation that are hard to remove. PID 3 Feels and tunes like PID 0 so people will be familiar with it. Much better feel than PID 0 and no coupling. Suffers from oscillations when really pushed. PID 4 Don't bother PID 5 Kind of like PID 3 but improved. Really nice feeling yaw and near the top of my fav list BUT>>>>..... Roll/pitch rates are coupled to the PID's....... WHY WOULD YOU DO THAT TO ME WHY WHY WHY WHY WHY WHY WHY!!!!!!!!!!!!!!!!! AGGRO! edit: peter1207 Podla screenov z configu lietas PID 0 Mozno si to mylis s profilom. Mozes mat nastavenych niekolko profilov, v kazdom mas rozne nastavenia (pozor, zmena profilu ovplyvnuje aj nastavenia PID, rates, nastavenia aux...) Da sa zmenit ovladacom (throttle 0, yaw left - zacne pipat a potom packou roll/pitch: 1 - roll left, pitch 0 2 - roll 0, pitch up 3 - roll right, pitch 0 Ak si to spravil spravne - pipne 1/2/3x podla vybraneho profilu |
|
peter1207 modelár
Příspěvků: 313 Moje modely Poslat zprávu |
Triki asi mas pravdu. Kde teda zmenim pid controller? Len pre zaujimavost. |
|
Thinky modelár
Příspěvků: 1008 Moje modely Poslat zprávu |
peter pid controller menis v zlozke PID Tuning a hned na zaciatku mas 0 - MultyWii (OLD) a jj pid controller 1 je tiez v poho ten tiez jazdi vela ludi.. matolowa je to mozne ze mam vyoseny motor lebo uz schytal jeden naraz ale pri openpilot SW mi copter pekne visel a netocil sa zacal sa tocit az ked som nahral CF.. inac takto lieta PID Luxfload odkaz na Youtube |
|
peter1207 modelár
Příspěvků: 313 Moje modely Poslat zprávu |
Jop thinkpad dik, uz som na to stihol prist Nic idem skusat |

- Odpovědět
Musíte byť prihlásený na pridávanie príspevkov.