

| autor | zpráva | |
|
cucpo modelár Příspěvků: 103 Moje modely Poslat zprávu |
||
|
neclovek modelár 
Příspěvků: 942 Moje modely Poslat zprávu |
Neskoro, hodinu dozadu som to pozeral a už nič nemajú. |
|
|
Zeldos modelár 
Příspěvků: 492 Moje modely Poslat zprávu |
Mio suhlasim treba to navrhnut niektoremu z adminov .... neclovek isiel si rovno po swift ci si mal aj inu medzi ktoru si sa rozhodoval ? |
|
|
duri04 modelár Příspěvků: 12 Moje modely Poslat zprávu |
Tie vrtule na HK boli ombedzene na 4ks na jeden nakup ... netreba smutit  |
|
|
neclovek modelár
Příspěvků: 942 Moje modely Poslat zprávu |
Switft, skyplus, hs1177, pz0420, ono je to všetko to isté. |
|
|
Thinky modelár 
Příspěvků: 1008 Moje modely Poslat zprávu |
mato perfektne  aspon niekto sa tu podeli s videom.. ostatny su nejaky sukromnici aspon niekto sa tu podeli s videom.. ostatny su nejaky sukromnicizeldos ani tato nemusi byt zla http://www.surveilzone.com/Foxeer-Sony-CCD-Arrow-camera-Built-in-OSD-Audio-5~22V--g-1543 ma vstavane osd a mikrofon.. |
|
|
Zeldos modelár
Příspěvků: 492 Moje modely Poslat zprávu |
Thinky aj nad nou uvazujem to je ta HS1190 teda aspon tak som ju nasiel a asi ju aj vezmem nech skusim nieco nove a este taka otazocka aby som neobjednal blbost tak -lens: 2.8 to je ten standart ci lietate niekto 3.6 pripadne 2.1 ? -mod: IR block ak si dobre pamatam dakujem |
|
|
neclovek modelár
Příspěvků: 942 Moje modely Poslat zprávu |
Mne akurát dnes zhorel motor pri peknom desyncu a navyše aj tak stále nemám kameru a ani DVR |
|
|
Thinky modelár
Příspěvků: 1008 Moje modely Poslat zprávu |
standart lens je 2.8 ale teraz masovo vseci prechadzaju na novinku 2.5 ja ju mam uz tiez na ceste.. (ale pozor 100 degree nie 120)! a ano IR Block lebo IR Sensitive je na tmu neclovek desync je co? to nepoznam nestalo sa mi este nic take |
|
|
riso modelár 
Příspěvků: 15 Moje modely Poslat zprávu |
https://oscarliang.com/best-fpv-camera-quadcopter/ |
|
|
neclovek modelár
Příspěvků: 942 Moje modely Poslat zprávu |
Ja mám 2,4mm 120 stupňov a lieta sa s tým dobre, nieje problém triafať bránky ani robiť kravinky okolo stromov, pekne vidím aj okolo seba. Desync: v skratke to je keď ti vo vzduchu nechcene zastaví motor. ESC musí stále vedieť v akej polohe je motor aby vedelo pustiť do správnej fázy kladné a záporné napätie podľa toho okolo ktorých "ramien" statora prechádzajú magnety. Polohu zistí tak, že magnet prechádzajúci okolo ramena v danej fáze naindukuje napätie. Keď však ESC zle načasuje pulzy čolen o pár desatín mikrosekúnd, tak zrazu namiesto odtláčania magnetov za ramenom a priťahovania magnetov pred ramenom môže na pár pulzov spraviť presný opak a to zabrzdí motor. Potom sa v lepšom prípade ESC spamätá a motor znova roztočí. To je väčšinou tak 0,5 až 2 sekundy, zatiaľ sa koptéra sama nakláňa smerom k spomalenému motoru a ak sa z toho PID loop ešte nezbláznil a nezačal koptéru rapídne točiť kadejako v snahe ju narovnať, tak po rozbehnutí motora sa to väčšinou dá ušoférovať a letieť ďalej. V horšom prípade sa ESC nevschopí a motor sa neroztočí = nakláňanie > rapídne otáčky > crash. V najhoršom prípade sa motor nielen nedokáže roztočiť, ale ESC si ani neuvedomí, kde je problém a cez motor naďalej tlačí veľké prúdy s vysokou frekvenciou, čo mu keď je zastavený vôbec neprospieva a motor sa do pár sekúnd upečie. |
|
|
Zeldos modelár
Příspěvků: 492 Moje modely Poslat zprávu |
Dakujem za rady |
|
|
Thinky modelár
Příspěvků: 1008 Moje modely Poslat zprávu |
tak toto sa mi na kissoch nestalo v zivote nikdy aspon jedna pozitivna vec |
|
|
JiriF modelár 
Příspěvků: 184 Moje modely Poslat zprávu |
To potom mas nizke min_throttle ked ti za letu zhasne motor, ja ho kvoli moznemu desync na nulovom plyne (poryv vetru, prudke klesanie v ose, zotrvacne manevre) nastavujem na vysiu hodnotu a radsej vypnem pid_at_min_throttle aby to po zapnuti a pristati na zemi nebolo nervozne. Airmode zatial nepouzivam co by pri starte a pristati samozrejme negovalo moje pid_at_min_throttle nastavenie. |
|
|
crash123 modelár 
Příspěvků: 29 Moje modely Poslat zprávu |
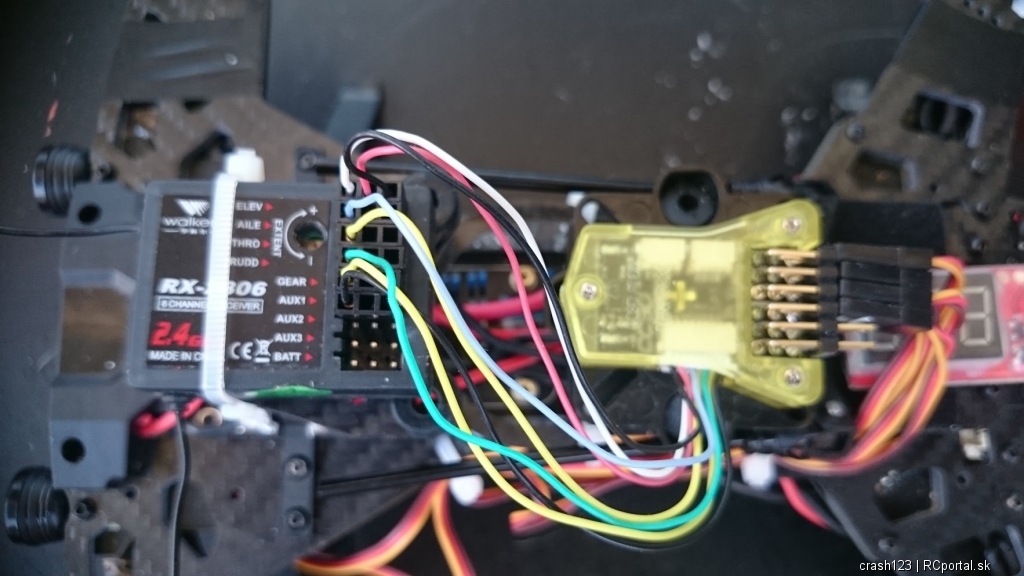 Zdravím vás potreboval by som poradiť. V open pilot som ponadstavoval na koptéru s CC3D Atom mini, testy motorov ok, len mi nejde nakalibrovať visielač, mám Walkira WK-2602 a prímač RX-2806, vobec mi nereaguje na koptéru. Dakujem Zdravím vás potreboval by som poradiť. V open pilot som ponadstavoval na koptéru s CC3D Atom mini, testy motorov ok, len mi nejde nakalibrovať visielač, mám Walkira WK-2602 a prímač RX-2806, vobec mi nereaguje na koptéru. Dakujem |

- Odpovědět
Musíte byť prihlásený na pridávanie príspevkov.