

- Kategorie
RC Video Magazín (12)
RC vybavení (48)
Stavba (62)
Letadla (28)
Vrtulníky (8)
Auta a lodě (13)
Ostatní (71)
Čo treba vedieť o koptérach?
Přidané: 14. 6. 2015 o 08:35 | ID článku: CLA273 | Zobrazeno: 10590x | Komentářů: 2 | Autor: Dzino
V poslednej dobe sú koptéry stále viac populárnejšie a veľa začiatočníkov plánuje kúpu koptéry. S kúpou koptéry sa začínajú vynárať rôzne odborné termíny, ktorým začiatočník nemusí rozumieť. Úlohou tohto článku je oboznámiť čitateľa s časťami koptéry a odovzdať základné informácie čo by mal vedieť o nich vedieť.
Časti koptéry:
- Riadiacia jednotka
- Motory
- ESC
- Vrtule
- Kostra koptéry (main frame)
- Power Distribution Board
- Batéria
- Prijímač
- FPV
Riadiacia jednotka
Riadiaca jednotka slúži na ovládanie koptéry. V podstate prevádza príkazy z ovládača na otáčky motorov a vlastne tak riadi model. Na riadiacu jednotku sú nepojené rôzne senzory, ktoré výrazne zlepšujú ovládanie modelu. Dnes už každá jednotka (dokonca aj v koptére-hračke) obsahuje gyro senzor. Je to vlastne snímač naklonenia koptéry. Ak gyro senzor pri lete zaznamená natočenie koptéry (bez príkazu z vysielača), tak riadiaca jednotka vykompenzuje to naklonenie a koptéru urdží vo vodorovnom stave. Riadiace jednotky iba s Gyrom síce uržia koptéru pri visení vodorovne, ale to neznamená že koptéra ostane presne na jednom mieste voči zemi. Vplyvom vetra ale aj rôznych mechanických vplyvov koptéra pomaličky pláva vo všetkých smeroch a je nutné cez ovládač dávať príkazy aby ostala na jednom mieste voči zemi.
Na to aby koptéra naozaj ostala na mieste sú potrebné ďaľšie senzory. Najdôležitejší je GPS potom magnetomer a okrem toho ešte môže mať jednotka aj barometer a ultrazvukový diaľkomer. S takýmito senzormi už riadiaca jednotka vie už vyhodnotiť svoju polohu voči zemi a naozaj visieť na mieste.
S GPS senzorom už je koptéra schopná samostatného letu. Cez konfiguračný program sa nastavia body cez ktoré ma preletieť a po zapnuté autonómneho letu koptéra letí sama bez ovládania páčkami. Koptéram s GPS senzorom je možné nastaviť aj príkaz automatického návratu na miesto štartu. Koptéra si uloží GEO pozíciu kde vzlietla a pri prijatí signálu na návrat (alebo je možné nastaviť aj pre prípad straty signálu, alebo pri nízkom napätí na batérii) sa vráti naspäť na pozíciu vzletu.
Lacnejšie koptéry (väčšinou hračky) majú v rámci riadiacej jednotky spojené všetky moduly do jedného. V koptére je iba jeden plošný spoj v rámci ktorého je riadiaca jednotka, prijímač a aj ovládanie motorov.
Ako príklad riadiacej jednotky pre koptéry typu racer spomeniem Naze32 a CC3D:


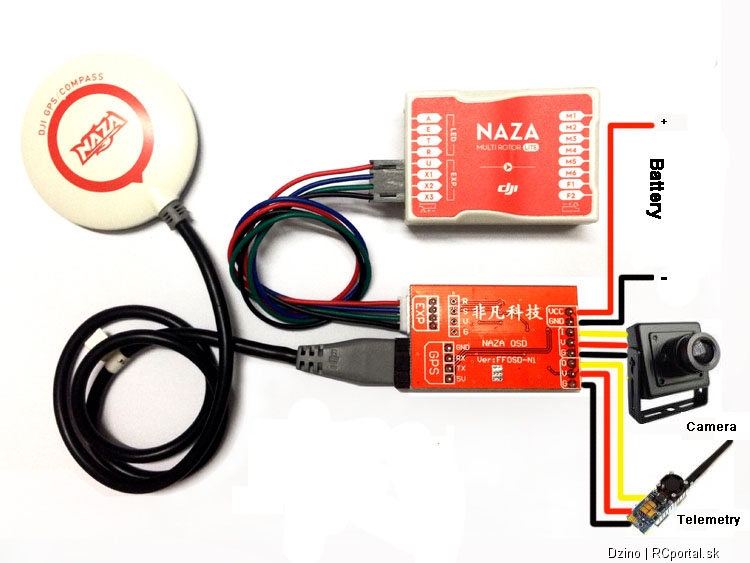
Ako príklad riadiacej jednotky pre autonómny let spomeniem NAZA alebo Ardupilot APM (samozrejme je aj kopa ďalších jednotiek):


Motory
Z hľadiska druhu napájania motorov sa v koptérach používajú:
- Jednosmerné (po anglicky označované ako brushed)
- Striedavé motory (po anglicky označované ako anglicky brushless)
Jednosmerné motory (tzv. Brushed)
Výhodou týchto motorov je nízka cena a jednoduchá elektronika na ovládanie. Otáčky motora sa riadia zmenou napätia a smer otáčok prehodením polarity napätia. Hlavný rozlišovací znak je, že k motoru vedú iba 2 kábliky (ku striedavému 3 kábliky). Nevýhodou týchto motorov je mechanická náchylnosť. Motorčeky sa rýchlo prehrievajú a najnáchylnejšou časťou su kontakty na rotor motora ktoré sa rýchlo opotrebujú (tzv. komutátor a kvoli tomuto tieto motorčeky volajú Angličania brushed). Treba počítať, že tieto motory môžu rýchlo odísť (už aj po pol roku). Po každom lete je potrebné počkať pokiaľ motory vychladnú a až potom založiť novú batériu a znova letieť (a vždy mať po ruke nejaký náhradný motor).
Striedavé motory (tzv. Brushless)
Stiredavé motory sa používajú vo všetkých vážnejších koptérach. Výhodou oproti jednosmerným je výrazne vyššia životnosť. Pre koptéry sa používajú outrunner motory čo znamená, že cievky motora sú v strede motora pripevnené o spodok motora a ten je pripevnený na koptéru. Otáča sa vonkajší obal motora na ktorom sú pripevnené magnety. Tento motor už nemá kontakty na rotor a tak nedochádza k iskreniu a obrusovaniu kontaktov - toto dôvod vyššej životnosti. Nevýhodou je vyššia cena a nutnosť mať komplikovanú elektroniku, ktorá ovláda motor.
Označovanie Brushless motorov pre koptéry:
Typové označenie motora pre koptéry sa skladá zo 4 čísel a hodnoty kv. Napríklad Emax 1806 2300kv, ZMR 1804 2400kv, Sunnysky X2204 2300KV
Prvé 2 čísla označujú priemer motora/rotora (nie skutočný vonkajší)
Druhé 2 čísla odkazujú na výšku motora/rotora - čím je toto číslo vyššie, tak motor je vyšší
Hodnota kv je počet otáčok za 1Volt napájacieho napätia. Napríklad ak máme motor s 2400kv a budeme napájať s 3S s 11,1Voltami, tak motor bude mať otáčky 2400 * 11,1 = 26640 otáčok teoretických (v skutočnosti má motor účinnosť okolo 90%, čiže reálne otáčky budú niššie).
Viac informácií o označovaní morov je v tomto videu:
odkaz na Youtube
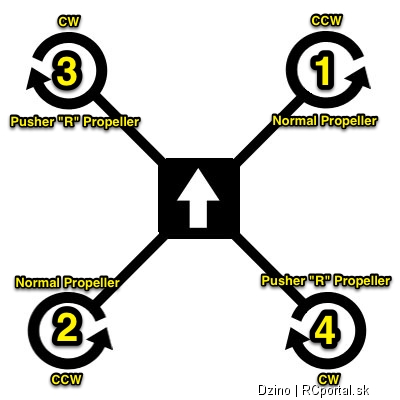
U koptér sa motory neotáčajú rovnakým smerom. Zoberme si napríklad quadrokoptéru:
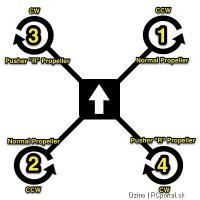
Motory 1 a 2 sa otáčajú proti smeru ručičkových hodiniek čo sa anglicky označuje CCW (CCW = Coutner-ClockWise) a motory 3 a 4 sa otáčajú v smere otáčania ručičkových hodiniek čo sa anglicky označuje CW (CW = ClockWise). Ako motoru ako takému je jedno ako sa otáča, bude fungovať pre oba smery, len pre uchytenie vrtule to nie je jedno. Vrtula je prichytená takou čiapočkou v ktorej je závit. Ten závit musí zaťahovať vždy proti smeru otáčania vrtule, lebo inak by sa za letu čiapočka uvolnila a vrtuľa by odpadla (mam to otestované fakt odpadne). Kvôli smeru závitu na vyrábajú motory v dvoch prevedeniach: CW a CCW. To či je motor CW alebo CCW označuje farba čiapočky. Zvyčajne červená alebo strieborná čiapočka je pre CW a čierna pre CCW:
fakt odpadne). Kvôli smeru závitu na vyrábajú motory v dvoch prevedeniach: CW a CCW. To či je motor CW alebo CCW označuje farba čiapočky. Zvyčajne červená alebo strieborná čiapočka je pre CW a čierna pre CCW:

Existujú aj motory kde sa uchytenie vrtule dodáva zvlášť. Tam motor je rovnaký pre oba smery,len uchytenie sa kupuje CW/CCW:


ESC
ESC je z anglického Electronic speed controllers čo v preklade znamená Elektronický ovládač rýchlosti (motora). V podstate je to súčiastka, ktorá na základe impulzov z riadiacej jednotky ovláda otáčky elektromotora. Najdôležitejším parametrom ESC je nominálny prúd na ktorý je ESC stavaný. ESC sa vždy berie podľa typu motora.
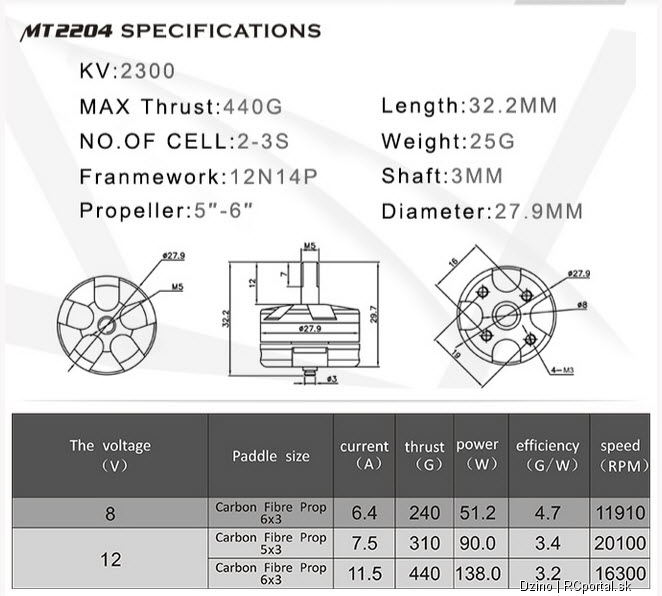
Napríklad ak si zoberieme katalógový list motora Emax MT2204 2300KV, tak vidíme, že pre 3S (11,1V) batériu a vrtuľu 6x3 bude prúd 11,5A. Čiže je potrebný minimálne 12A ESC:
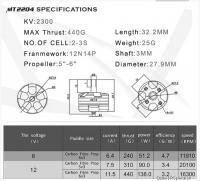
Tabuľka zároveň aj ukáže aj maximálny ťah pri danej kombinácii Motor, vrtuľa, batéria. Podľa tejto tabuľky aj vyberáme motor pre koptéru. Ťah všetkých motorov dokopy by mal byť zhruba polovica váhy koptéry.
ESC zvyčajne slúži aj na napájanie riadiacej riadiacej jednotky. ESC obsahuje aj elektronický obvod BEC (Battery Eliminator Circuit) čo je vlastne regulátor napätia pre riadiacu jednotku. Batérie sa vyrábajú s rôznym počtom článkov (2S-7.4V, 3S-11.1V, 4S-14.8V) a riadiaca jednotka potrebuje stále fixné napätie 5V. Toto zabezpečuje BEC.
Ak je ESC v prevedení OPTO, tak nemá zabudovaný BEC a je potrebné doplniť separátny BEC.

Pre koptéry nie je možné použiť hocijaký typ ESC. ESC musí výrazne rýchlejšie reagovať na zmenu otáčok než ESC pre lietadlá alebo helikoptéry. Preto do ESC koptér vyvinuli špeciálny firmware s názvom SimonK alebo BLHeli. V minulosti bolo potrebné firmware napaľovať do ESC, ale dnes už je široký výber ESC kde je už firmware napálený od výrobcu.
Vrtule
Význam vrtule asi nie je treba vysvetľovať . Vrtuľa sa vyberá na základe použitého motora. Katalógový list motora obsahuje aj typ vrtule pre ktorú je konštruovaný. Vrtule sa označujú priemerom a stúpaním. Označenie 6x3 znamená priemer vrtule 6" a stúpanie 3. Niektorí výrobcovia (napríklad GemFan) označujú vrtule 4 miestnym číslom napríklad 5030, 5045, 6030 atď. Pri tomto označené prvé 2 čísla znamenajú priemer a druhé 2 čísla stúpanie. Tak vrtuľa 5030 je to isté ako 5x3 od iného výrobcu.

Vrtule sa vždy montujú popisom hore. Tak ako motory, tak aj vrtule vyrábajú pravotočivé a ľavotočivé. Je veľmi dôležité namontovať správnu vrtuľu na správny motor.
Vrtuľa na CCW - Coutner-ClockWise motor je označená písmenom R za označením typu vrtule:

Hoci sa vrtule sa vyrábajú presným odlievaním, ale pri otáčkach pri akých sa vrtule otáčajú stačí malá nevyváženosť a vibrácie z vrtúľ roztrasú celú koptéru. Preto je potrebné skontrolovať vyváženie každej vrtule ktorú ideme montovať na koptéru.
Na vyváženie sa používajú vyvažovačky:

Postup vyvažovania:
odkaz na Youtube
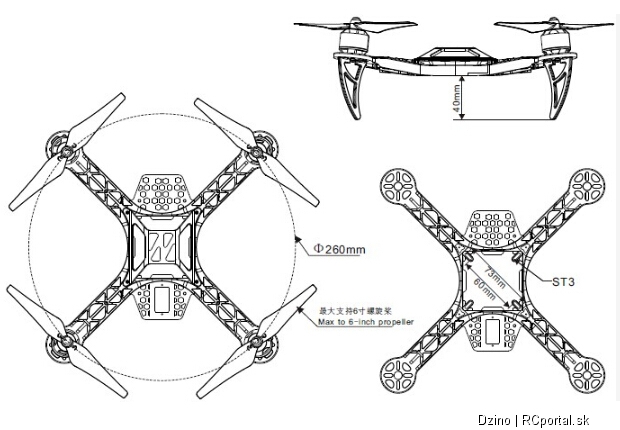
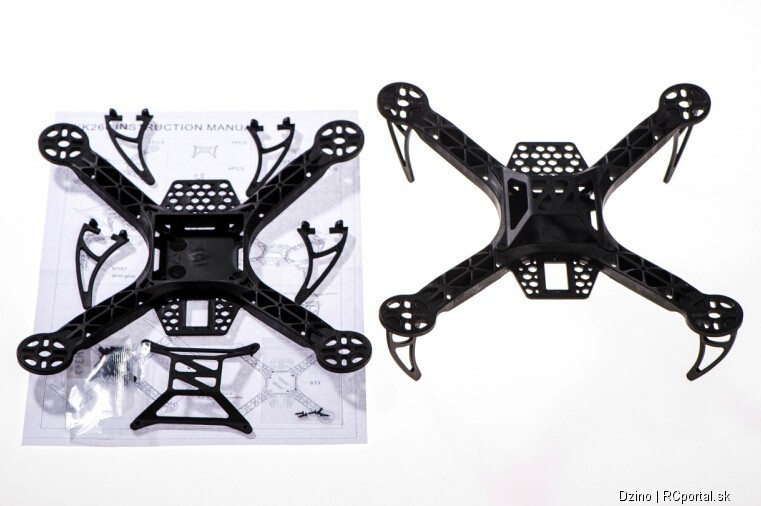
Kostra koptéry (main frame)
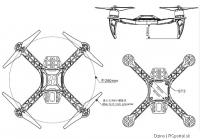
Do kostry koptéry sa vlastne namontujú všetky diely koptéry a vlastne drží celú koptéru po kope. Veľkosť rámu sa označuje v mm. Je to vlastne priemer kruhu na ktorom sú umiestnené motory. Ak máme rám KK260, tak motory sú umiestnené na kruhu o priemere 260mm:
Dnes už je naozaj veľký výber rámov, takže každý si môže vybrať.


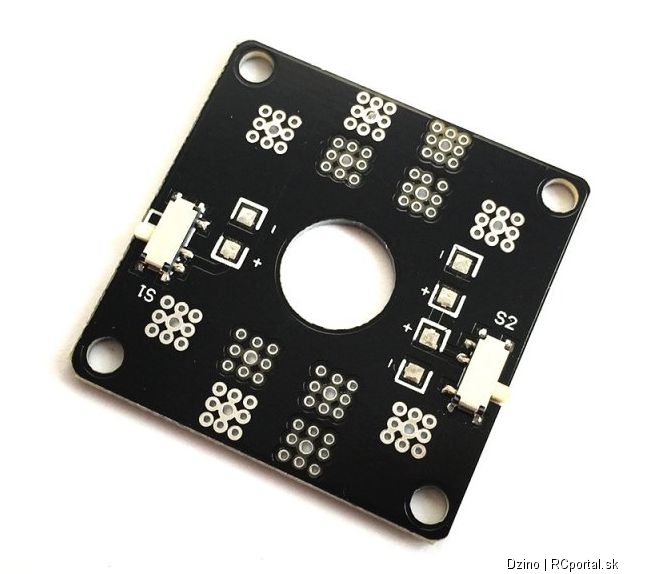
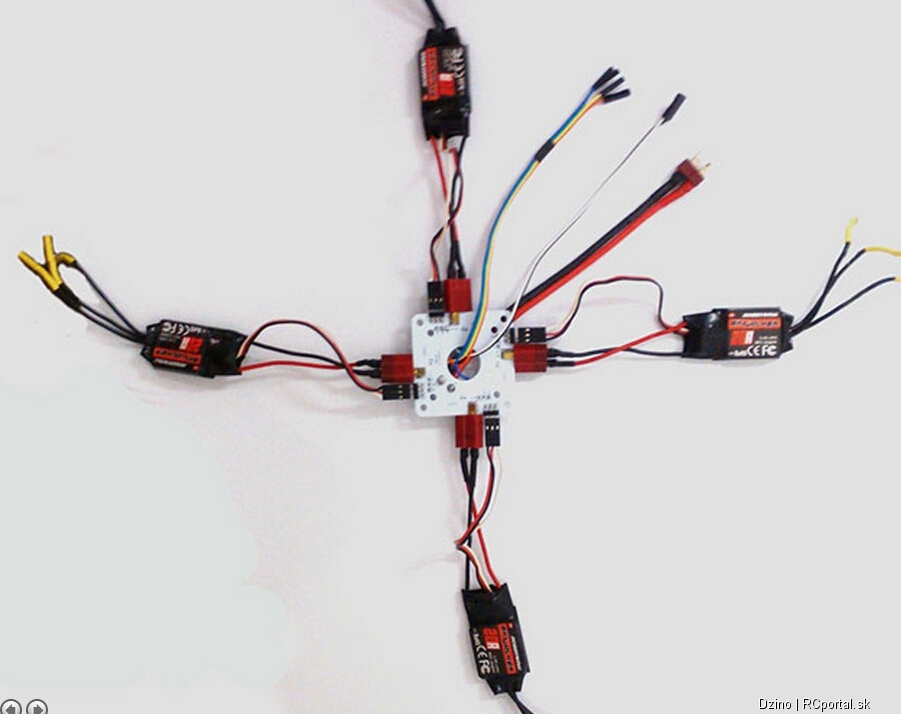
Power Distribution Board
Power Distribution Board (PDB) v preklade rozvádzacia doska napájacieho napätia. Napätie z batérie privedie na PDB a potom napájacie kábliky z ESC sa pripájajú na PDB. Je to praktickejšie než vytvárať veľkú guču cínu na ktorú sa pospájajú všetky kábliky. Drahšie kostry koptér už majú PDB integrovanú do rámu.


Bateria
V koptérach sa používajú batérie LiPo. Batérie LiPo sa označujú počtom článkov batérie(1S, 2S, 3S, 4S...), kapacitou batérie v mAh a max. vybíjací prúd (parameter C)
Napríklad 4S 1400mAh 40C:

Počet článkov batérie
Počet článkov batérie sa označuje číslom a písmenom S napr. 1S, 2S, 3S... Na každý článok sa počíta nominálne napätie 3,7V - čiže čím väčší počet článkov, tak tým vyššie napätie má batéria (2S batéria má 7,4V, 3S batéria 11,4V atď). Napätie 3,7 je nominálne napätie na jeden článok - v skutočnosti sa napätie mení podľa toho ako je batéria nabitá alebo vybitá. Pri plnom nabití má batéria 4,2V na jeden článok. Najnižšie napätie pri ktorom sa ešte batéria neničí je 2,8V pri záťaži, ale v praxi sa neodporúča vybiť pod 3V. Počet článkov batérie vyberáme podľa použitého motora. Príklad katalógového listu som dal to sekcie o motoroch.
Kapacita batérie
Kapacita batérie sa udáva v mAh (mili Ampér hodninách). Čím je kapacita vyššia, tak tým dlhší letový čas môžeme očakávať. Ale z väčšou kapacitou sa zväčšuje aj hmotnosť batérie - ak sa hmotnosť preženie, tak sa môže stať, že koptéra ani len nevzlietne. Pre každú koptéru je potrebné nájť optimálnu kapacitu pri ktorej sa neznížia letové vlastnosti, ale dosihneme dostatočný čas letu.
Max. vybíjací prúd
Maximálny vybíjací prúd ktorý môže batéria dať sa označuje parametrom C. Napríklad ak máme batériu 4S 1400mAh 40C, tak maximálny vybíjací prúd bude kapacita vynásobená parametrom C, čiže pre našu batériu to je 1,4A * 40 = 56A. To, znamená, že batária môže dať 56A konštantný prúd. Ak maximálny prúd podelíme počtom motorov na koptére, tak pre kvardokoptérú to vychádza 56A/4=14A, čiže daná batéria bez problémov dokáže napájať motory s 14A trvalým odberom. Hobby king označuje batérie rozsahom parametrov C. Napríklad 40-80C. Prvý parameter je pre konštantný odber, druhý parameter pre krátkodobý odber (10 sekúnd). Čiže pre našu batériu je maximálny prúd po dobu 10sekúnd na hodnote 112A
Nabíjanie batérií
Ak ku koptére dostanem nabíjačku, tak nič neriešime, použijeme tú. Väčšinou tieto nabíjačky majú na pevno nastavený nabíjací prúd a nič sa nedá nastavovať. Nevýhodou takejto nabíjačky je zvyčajne dlhý nabíjací čas batérie. Ak chceme skrátiť nabíjací čas, tak je potrebné dokúpiť nabíjačku s možnosťou nastavenia nabíjacieho prúdu. Pre našu batériu (MultiStar Race Spec 4S 1400mAh 40-80C) výrobca uvádza maximálny nabíjací prúd 2C, čiže 1400mAh*2=2,8A. Pri takomto prúde je batéria nabitá do pol hodiny. Mne sa osvedčila nabíjačka IMAX B6AC, ale samozrejme existuje kopa iných nabíjačiek s nastaviteľným prúdom.
Skladovanie batérií
Batérie je potrebné skladovať na chladnom mieste (nie v mraze) a vybité cca na 50% (3,8V na článok). Skladovanie plne nabitých baterií znižuje kapacitu batérie.
Výhodou kvalitnej nabíjačky je, že má STORAGE MODE v ktorom automaticky nabije/vybije batériu tak aby bola pripravená na skladovanie.
V praxi týždeň bez problémov vydrží plne nabitá batéria, ale ak dhší čas nelietame, tak rozhodne odporúčam vybiť na 3,8V a tak skladovať.
Prijímač
Prijímač slúži na prijatie signálov z vysielača a poslanie do riadiacej jednotky. Pre koptéry typu hračka je prijímač na jednej doske spolu s riadiacou jednotkou.
U väčších koptér je prijímač oddelený od riadiacej jednotky.
Prijímač môže byť pripojený rôznymi spôsobmi:
- Každý kanál samostatne káblikom (označuje sa to PWM)
- Jedným káblikom v ktorom sú prenášané všetky kanály (označuje sa to PPM)
- Spektrum satelit - toto je pre špeciálne pripojenie pre vysielače Spektrum
V tomto článku to nebudem detailnejšie rozoberať prijímače, dávam link na YouTube video, kde to je pekne vysvetlené:
odkaz na Youtube
FPV
FPV je skratka z First-person view - čo v preklade znamená pohľad z prvej osoby - čím sa myslí pohľad priamo z modelu.
Pre FPV potrebujeme:
- Kameru
- FPV Vysielač s anténou
- Prijímač s anténou
- Zobrazovaciu jednotku
Kamera
Existuje veľké množstvo kamier pre FVP. Kamery sa zvyčajne označujú počtom riadkov ktoré snímajú a zorným uhlom. Napríklad kamera Eachine CCD 700tvl 148 Degree Camera má 700 TV riadkov a zorné pole 148°. Čím viac riadkov má kamera, tak tým kvalitnejší je výsledný obraz,ale na druhej strane nemá význam kupovať kameru z vyšším počtom riadkov než dokáže display zobraziť.
Možno ste si všimli, že na koptery typu Racer dávajú 2 kamery: Jednu pomocou ktorej riadia koptéru a druhú na natáčanie videa. Ak vám teraz napadlo, že načo dávajú ľudia 2 kamery, keď väčšina kamerier má TV výstup - tak vám rovno odpoviem, že dôvodom je latencia obrazu. Latencia je opozdenie obrazu od momentu keď je obraz nasnímaný kamerou a zobrazený na display. Kamery typu Mobius, GoPro, SJCAM majú veľkú latenciu - t.j. opozdenie obrazu - kľudne sa môže stať, že kvôli opozdeniu obrazu na obrazovke vidíte, že koptére je ešte pred stromom, ale v skutočnosti už koptera napálila do stromu. To nie je dobrý stav. Ešte väčšiu latenciu majú kamery s WiFi prenosom. Kamery na FPV majú nízku latenciu a preto sa používajú na ovládanie.

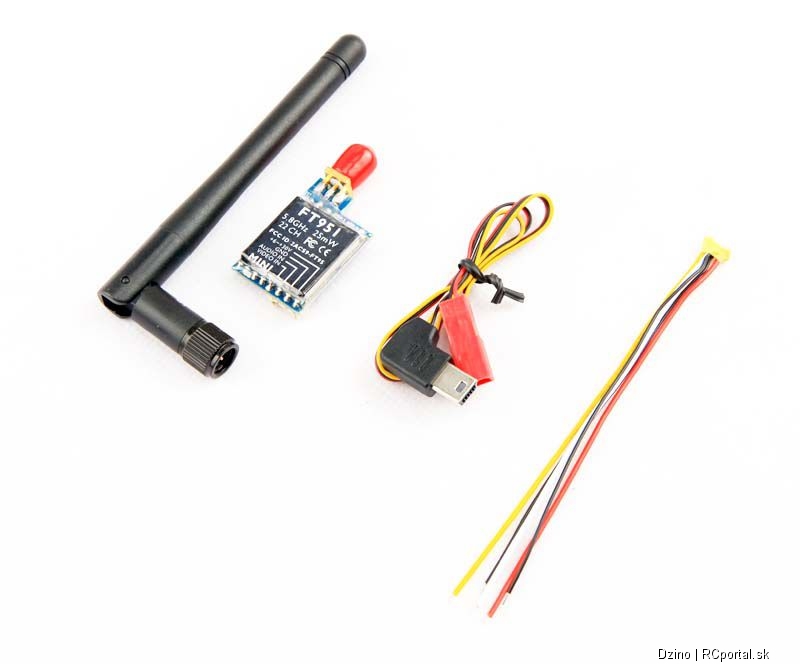
FPV Vysielač s anténou
Vysielač je malá krabička, ktorá slúži na vysielanie TV obrazu nasnímaného kamerou. Pre vysielač sú podstatné nasledovné parametre:
-Frekvencia na ktorej vysiela - zvyčajne sa používa 5,8GHz, ale pre lepší prenos v budovách sa používa 1,2GHz, ale to sú už špeciálne vysielače
-Počet kanálov - zvyčajne sa používajú 8 alebo 32 kanálové vysielače. Na vysielači nastavíte kanál a potom ten istý kanál musíte naklikať na prijímači
-Vysielací výkon - výkon sa udáva v mW (mili Watoch). Čím vyšší výkon vysielača, tak tým z väčšej vzdialenosti môžeme prijať TV signál z koptéry. Štandardne sa vyrábajú 200mW a 600mW.
Pri frekvencii 5,8GHz treba dávať pozor na to, že signál je citlivý na prekážky medzi koptérou a prijímačom. Aj keby ste namontovali 600mW vysielač, a panelová stena by bola len 20metrov od vás, tak keď za ňu zaletíte, tak v momente vypadáva video signál. Na to treba dať pozor...
Dosah vysielača je možné zvýšiť aj kvalitnou anténou. Štandardne sa vysielač dodáva s lineárnou anténou (taká palička). Pri použití cirkulárnej antény (anténa vypadá ako hríbik) sa zvýši príjem a takáto anténa je menej náchylná na zmenu smeru koptéry. Odporúčam použivať cirkulárne antény.


Prijímač s anténou
Prijímač je krabička na prijímanie signálu z vysielača. Prijímač vyberáme podľa frekvencie vysielača - t.j. ak máme 5,8GHz vysielač, tak samozrejme aj prijímač musí byť pre túto frekvenciu. Na prijímači sa potom nastavuje kanál na ktorom má prijímať. Kanál sa skladá z písmena a čísla napr. A8. Ak na vysielači nastavíme A8, tak ten istý kanál nastavíme na prijímači. Ak kombinujeme vysielač a prijímač iných výrobcov, tak je potrebné skontrolovať či sú frekvencie pre rovnaké pre dané kanály. Nemusí to sedieť. Z prijímača vychádza TV out signál, ktorý sa priamo dá napojiť na LCD display alebo do okuliarov.
Aj signál na prijímači sa dá zlepšiť kvalitnou anténou. Tiež sa odporúča použiť cirkulárnu anténu (hríbik). Cirkulárne antény sú iné pre vysielač a prijímač. Pre prijímač treba použiť anténu s označením RX (receiver)

Zobrazovacia jednotka
Zobrazovacia jednotka slúži na zobrazenie obrazu z FPV kamery. Štandardne sa používajú malé LCD monitory alebo FPV okuliare.
Niektoré PFV monitory sa vyrábajú aj zo zabudovaným prijímačom. Ak máme taký monitor, tak iba pripojíme batériu, nastavíme frekvenciu a zobrazí sa obraz z kamery. Ak používame samostatný LCD monitor, tak sa výstup prijímača napája na vstup do LCD monitora. LCD monitor má CINCH vstup, čiže zapojenie je jednoduché.

Nevýhodou LCD monitora je zlá viditeľnosť za slnečného dňa. Tento problem riešia FPV okuliare. Pri výbere FPV okuliarov je potrebné dbať na 2 hlavné parametre:
- rozlíšenie monitora
- zorné pole (ang. FOV – field of view)
Rozlíšenie monitora
FPV okuliare sa vyrábajú v rozlíšeniach od 320x240 až po HD rozlíšenie. Čím väčšie je rozlíšenie, tak tým detailnejšie obraz vidíme. Pri rozlíšení 320x240 síce vidíte či je strom pred vami, alebo nie, ale moc ďaľších detailov nie. Odporúča sa mať minimálne 640x480.
Zorné pole (FOV)
Zorné pole je vlastne veľkosť obrazu akú vidíte po nasadení okuliarov. Veľa ľudí si myslí, že po nasadení okuliarov uvidí panoramatický obraz kde pohybom očí vidí obraz aj v pravo-vlavo aj hore a dolu. Žiaľ opak je pravdou. Po nasadení okuliarov uvidíte čiernu plochu, kde v strede obdĺžnik s obrazom. To, že aký veľký je obraz, určuje parameter FOV - zorné pole. FPV okuliare sa vyrábajú zo zorným polom od 25° do 46°. Aby sa to dalo predstaviť čo ten uhol znamená, skúsim vám prepočítať FOV na vzdialenosť od TV:
Dnešným štandardom je 40" TV. Nasadenie FPV okuliarov bude prezentovať ako keby ste vstúpili do úplne čiernej miestnosti kde na protiľahlej stene je pripevnená 40" TV na ktorej sa premieta obraz z kopéry. Ak máme FPV okuliare zo zorným polom 20°, tak obraz vidíme akoby sme stáli 2,5metra od TV. Ak máme FPV okuliare zo zorným polom 30° tak sa vzdialenosť skráti na 1,6m a pri 40° to už to je len 1,2m od TV.
Čiže ak máme okuliare s 320x240 a 20° zorným polom, tak vidíme málo detailov a ešte aj na malom obraze. Minimálnou požiadavkou na výber FPV okuliarov by malo byť rozlíšenie 640x480 a zorné pole 30°.

Okrem LCD monitorov a FPV okuliarov sa používa aj mačko-pes kde v plastovom head-sete je umiestnený LCD monitor. Fakt neviem ako to správne nazvať. Takéto okuliare riešia problém zo zlou viditeľnosťou obrazu za jasného dňa a pri tom to nestojí veľa. Nevýhoda je, že sa používa nekvalitná plastová optika a tak obraz je skreslený. To ani nie je optika ale zväčšujúci plastový panel. Ak by sa pre každé oko samostatná sklenená optika, tak výsledný pocit by bol o rád lepší.

Link: http://www.hobbyking.com/hobbyking/store/__53706__Quanum_DIY_FPV_Goggle_Set_with_Monitor_KIT_.html
Časti koptéry:
- Riadiacia jednotka
- Motory
- ESC
- Vrtule
- Kostra koptéry (main frame)
- Power Distribution Board
- Batéria
- Prijímač
- FPV
Riadiacia jednotka
Riadiaca jednotka slúži na ovládanie koptéry. V podstate prevádza príkazy z ovládača na otáčky motorov a vlastne tak riadi model. Na riadiacu jednotku sú nepojené rôzne senzory, ktoré výrazne zlepšujú ovládanie modelu. Dnes už každá jednotka (dokonca aj v koptére-hračke) obsahuje gyro senzor. Je to vlastne snímač naklonenia koptéry. Ak gyro senzor pri lete zaznamená natočenie koptéry (bez príkazu z vysielača), tak riadiaca jednotka vykompenzuje to naklonenie a koptéru urdží vo vodorovnom stave. Riadiace jednotky iba s Gyrom síce uržia koptéru pri visení vodorovne, ale to neznamená že koptéra ostane presne na jednom mieste voči zemi. Vplyvom vetra ale aj rôznych mechanických vplyvov koptéra pomaličky pláva vo všetkých smeroch a je nutné cez ovládač dávať príkazy aby ostala na jednom mieste voči zemi.
Na to aby koptéra naozaj ostala na mieste sú potrebné ďaľšie senzory. Najdôležitejší je GPS potom magnetomer a okrem toho ešte môže mať jednotka aj barometer a ultrazvukový diaľkomer. S takýmito senzormi už riadiaca jednotka vie už vyhodnotiť svoju polohu voči zemi a naozaj visieť na mieste.
S GPS senzorom už je koptéra schopná samostatného letu. Cez konfiguračný program sa nastavia body cez ktoré ma preletieť a po zapnuté autonómneho letu koptéra letí sama bez ovládania páčkami. Koptéram s GPS senzorom je možné nastaviť aj príkaz automatického návratu na miesto štartu. Koptéra si uloží GEO pozíciu kde vzlietla a pri prijatí signálu na návrat (alebo je možné nastaviť aj pre prípad straty signálu, alebo pri nízkom napätí na batérii) sa vráti naspäť na pozíciu vzletu.
Lacnejšie koptéry (väčšinou hračky) majú v rámci riadiacej jednotky spojené všetky moduly do jedného. V koptére je iba jeden plošný spoj v rámci ktorého je riadiaca jednotka, prijímač a aj ovládanie motorov.
Ako príklad riadiacej jednotky pre koptéry typu racer spomeniem Naze32 a CC3D:


Ako príklad riadiacej jednotky pre autonómny let spomeniem NAZA alebo Ardupilot APM (samozrejme je aj kopa ďalších jednotiek):

Motory
Z hľadiska druhu napájania motorov sa v koptérach používajú:
- Jednosmerné (po anglicky označované ako brushed)
- Striedavé motory (po anglicky označované ako anglicky brushless)
Jednosmerné motory (tzv. Brushed)
Výhodou týchto motorov je nízka cena a jednoduchá elektronika na ovládanie. Otáčky motora sa riadia zmenou napätia a smer otáčok prehodením polarity napätia. Hlavný rozlišovací znak je, že k motoru vedú iba 2 kábliky (ku striedavému 3 kábliky). Nevýhodou týchto motorov je mechanická náchylnosť. Motorčeky sa rýchlo prehrievajú a najnáchylnejšou časťou su kontakty na rotor motora ktoré sa rýchlo opotrebujú (tzv. komutátor a kvoli tomuto tieto motorčeky volajú Angličania brushed). Treba počítať, že tieto motory môžu rýchlo odísť (už aj po pol roku). Po každom lete je potrebné počkať pokiaľ motory vychladnú a až potom založiť novú batériu a znova letieť (a vždy mať po ruke nejaký náhradný motor).
Striedavé motory (tzv. Brushless)
Stiredavé motory sa používajú vo všetkých vážnejších koptérach. Výhodou oproti jednosmerným je výrazne vyššia životnosť. Pre koptéry sa používajú outrunner motory čo znamená, že cievky motora sú v strede motora pripevnené o spodok motora a ten je pripevnený na koptéru. Otáča sa vonkajší obal motora na ktorom sú pripevnené magnety. Tento motor už nemá kontakty na rotor a tak nedochádza k iskreniu a obrusovaniu kontaktov - toto dôvod vyššej životnosti. Nevýhodou je vyššia cena a nutnosť mať komplikovanú elektroniku, ktorá ovláda motor.
Označovanie Brushless motorov pre koptéry:
Typové označenie motora pre koptéry sa skladá zo 4 čísel a hodnoty kv. Napríklad Emax 1806 2300kv, ZMR 1804 2400kv, Sunnysky X2204 2300KV
Prvé 2 čísla označujú priemer motora/rotora (nie skutočný vonkajší)
Druhé 2 čísla odkazujú na výšku motora/rotora - čím je toto číslo vyššie, tak motor je vyšší
Hodnota kv je počet otáčok za 1Volt napájacieho napätia. Napríklad ak máme motor s 2400kv a budeme napájať s 3S s 11,1Voltami, tak motor bude mať otáčky 2400 * 11,1 = 26640 otáčok teoretických (v skutočnosti má motor účinnosť okolo 90%, čiže reálne otáčky budú niššie).
Viac informácií o označovaní morov je v tomto videu:
odkaz na Youtube
U koptér sa motory neotáčajú rovnakým smerom. Zoberme si napríklad quadrokoptéru:
Motory 1 a 2 sa otáčajú proti smeru ručičkových hodiniek čo sa anglicky označuje CCW (CCW = Coutner-ClockWise) a motory 3 a 4 sa otáčajú v smere otáčania ručičkových hodiniek čo sa anglicky označuje CW (CW = ClockWise). Ako motoru ako takému je jedno ako sa otáča, bude fungovať pre oba smery, len pre uchytenie vrtule to nie je jedno. Vrtula je prichytená takou čiapočkou v ktorej je závit. Ten závit musí zaťahovať vždy proti smeru otáčania vrtule, lebo inak by sa za letu čiapočka uvolnila a vrtuľa by odpadla (mam to otestované
fakt odpadne). Kvôli smeru závitu na vyrábajú motory v dvoch prevedeniach: CW a CCW. To či je motor CW alebo CCW označuje farba čiapočky. Zvyčajne červená alebo strieborná čiapočka je pre CW a čierna pre CCW:
Existujú aj motory kde sa uchytenie vrtule dodáva zvlášť. Tam motor je rovnaký pre oba smery,len uchytenie sa kupuje CW/CCW:


ESC
ESC je z anglického Electronic speed controllers čo v preklade znamená Elektronický ovládač rýchlosti (motora). V podstate je to súčiastka, ktorá na základe impulzov z riadiacej jednotky ovláda otáčky elektromotora. Najdôležitejším parametrom ESC je nominálny prúd na ktorý je ESC stavaný. ESC sa vždy berie podľa typu motora.
Napríklad ak si zoberieme katalógový list motora Emax MT2204 2300KV, tak vidíme, že pre 3S (11,1V) batériu a vrtuľu 6x3 bude prúd 11,5A. Čiže je potrebný minimálne 12A ESC:
Tabuľka zároveň aj ukáže aj maximálny ťah pri danej kombinácii Motor, vrtuľa, batéria. Podľa tejto tabuľky aj vyberáme motor pre koptéru. Ťah všetkých motorov dokopy by mal byť zhruba polovica váhy koptéry.
ESC zvyčajne slúži aj na napájanie riadiacej riadiacej jednotky. ESC obsahuje aj elektronický obvod BEC (Battery Eliminator Circuit) čo je vlastne regulátor napätia pre riadiacu jednotku. Batérie sa vyrábajú s rôznym počtom článkov (2S-7.4V, 3S-11.1V, 4S-14.8V) a riadiaca jednotka potrebuje stále fixné napätie 5V. Toto zabezpečuje BEC.
Ak je ESC v prevedení OPTO, tak nemá zabudovaný BEC a je potrebné doplniť separátny BEC.

Pre koptéry nie je možné použiť hocijaký typ ESC. ESC musí výrazne rýchlejšie reagovať na zmenu otáčok než ESC pre lietadlá alebo helikoptéry. Preto do ESC koptér vyvinuli špeciálny firmware s názvom SimonK alebo BLHeli. V minulosti bolo potrebné firmware napaľovať do ESC, ale dnes už je široký výber ESC kde je už firmware napálený od výrobcu.
Vrtule
Význam vrtule asi nie je treba vysvetľovať
. Vrtuľa sa vyberá na základe použitého motora. Katalógový list motora obsahuje aj typ vrtule pre ktorú je konštruovaný. Vrtule sa označujú priemerom a stúpaním. Označenie 6x3 znamená priemer vrtule 6" a stúpanie 3. Niektorí výrobcovia (napríklad GemFan) označujú vrtule 4 miestnym číslom napríklad 5030, 5045, 6030 atď. Pri tomto označené prvé 2 čísla znamenajú priemer a druhé 2 čísla stúpanie. Tak vrtuľa 5030 je to isté ako 5x3 od iného výrobcu.
Vrtule sa vždy montujú popisom hore. Tak ako motory, tak aj vrtule vyrábajú pravotočivé a ľavotočivé. Je veľmi dôležité namontovať správnu vrtuľu na správny motor.
Vrtuľa na CCW - Coutner-ClockWise motor je označená písmenom R za označením typu vrtule:

Hoci sa vrtule sa vyrábajú presným odlievaním, ale pri otáčkach pri akých sa vrtule otáčajú stačí malá nevyváženosť a vibrácie z vrtúľ roztrasú celú koptéru. Preto je potrebné skontrolovať vyváženie každej vrtule ktorú ideme montovať na koptéru.
Na vyváženie sa používajú vyvažovačky:

Postup vyvažovania:
odkaz na Youtube
Kostra koptéry (main frame)
Do kostry koptéry sa vlastne namontujú všetky diely koptéry a vlastne drží celú koptéru po kope. Veľkosť rámu sa označuje v mm. Je to vlastne priemer kruhu na ktorom sú umiestnené motory. Ak máme rám KK260, tak motory sú umiestnené na kruhu o priemere 260mm:
Dnes už je naozaj veľký výber rámov, takže každý si môže vybrať.

Power Distribution Board
Power Distribution Board (PDB) v preklade rozvádzacia doska napájacieho napätia. Napätie z batérie privedie na PDB a potom napájacie kábliky z ESC sa pripájajú na PDB. Je to praktickejšie než vytvárať veľkú guču cínu na ktorú sa pospájajú všetky kábliky. Drahšie kostry koptér už majú PDB integrovanú do rámu.
Bateria
V koptérach sa používajú batérie LiPo. Batérie LiPo sa označujú počtom článkov batérie(1S, 2S, 3S, 4S...), kapacitou batérie v mAh a max. vybíjací prúd (parameter C)
Napríklad 4S 1400mAh 40C:

Počet článkov batérie
Počet článkov batérie sa označuje číslom a písmenom S napr. 1S, 2S, 3S... Na každý článok sa počíta nominálne napätie 3,7V - čiže čím väčší počet článkov, tak tým vyššie napätie má batéria (2S batéria má 7,4V, 3S batéria 11,4V atď). Napätie 3,7 je nominálne napätie na jeden článok - v skutočnosti sa napätie mení podľa toho ako je batéria nabitá alebo vybitá. Pri plnom nabití má batéria 4,2V na jeden článok. Najnižšie napätie pri ktorom sa ešte batéria neničí je 2,8V pri záťaži, ale v praxi sa neodporúča vybiť pod 3V. Počet článkov batérie vyberáme podľa použitého motora. Príklad katalógového listu som dal to sekcie o motoroch.
Kapacita batérie
Kapacita batérie sa udáva v mAh (mili Ampér hodninách). Čím je kapacita vyššia, tak tým dlhší letový čas môžeme očakávať. Ale z väčšou kapacitou sa zväčšuje aj hmotnosť batérie - ak sa hmotnosť preženie, tak sa môže stať, že koptéra ani len nevzlietne. Pre každú koptéru je potrebné nájť optimálnu kapacitu pri ktorej sa neznížia letové vlastnosti, ale dosihneme dostatočný čas letu.
Max. vybíjací prúd
Maximálny vybíjací prúd ktorý môže batéria dať sa označuje parametrom C. Napríklad ak máme batériu 4S 1400mAh 40C, tak maximálny vybíjací prúd bude kapacita vynásobená parametrom C, čiže pre našu batériu to je 1,4A * 40 = 56A. To, znamená, že batária môže dať 56A konštantný prúd. Ak maximálny prúd podelíme počtom motorov na koptére, tak pre kvardokoptérú to vychádza 56A/4=14A, čiže daná batéria bez problémov dokáže napájať motory s 14A trvalým odberom. Hobby king označuje batérie rozsahom parametrov C. Napríklad 40-80C. Prvý parameter je pre konštantný odber, druhý parameter pre krátkodobý odber (10 sekúnd). Čiže pre našu batériu je maximálny prúd po dobu 10sekúnd na hodnote 112A
Nabíjanie batérií
Ak ku koptére dostanem nabíjačku, tak nič neriešime, použijeme tú. Väčšinou tieto nabíjačky majú na pevno nastavený nabíjací prúd a nič sa nedá nastavovať. Nevýhodou takejto nabíjačky je zvyčajne dlhý nabíjací čas batérie. Ak chceme skrátiť nabíjací čas, tak je potrebné dokúpiť nabíjačku s možnosťou nastavenia nabíjacieho prúdu. Pre našu batériu (MultiStar Race Spec 4S 1400mAh 40-80C) výrobca uvádza maximálny nabíjací prúd 2C, čiže 1400mAh*2=2,8A. Pri takomto prúde je batéria nabitá do pol hodiny. Mne sa osvedčila nabíjačka IMAX B6AC, ale samozrejme existuje kopa iných nabíjačiek s nastaviteľným prúdom.
Skladovanie batérií
Batérie je potrebné skladovať na chladnom mieste (nie v mraze) a vybité cca na 50% (3,8V na článok). Skladovanie plne nabitých baterií znižuje kapacitu batérie.
Výhodou kvalitnej nabíjačky je, že má STORAGE MODE v ktorom automaticky nabije/vybije batériu tak aby bola pripravená na skladovanie.
V praxi týždeň bez problémov vydrží plne nabitá batéria, ale ak dhší čas nelietame, tak rozhodne odporúčam vybiť na 3,8V a tak skladovať.
Prijímač
Prijímač slúži na prijatie signálov z vysielača a poslanie do riadiacej jednotky. Pre koptéry typu hračka je prijímač na jednej doske spolu s riadiacou jednotkou.
U väčších koptér je prijímač oddelený od riadiacej jednotky.
Prijímač môže byť pripojený rôznymi spôsobmi:
- Každý kanál samostatne káblikom (označuje sa to PWM)
- Jedným káblikom v ktorom sú prenášané všetky kanály (označuje sa to PPM)
- Spektrum satelit - toto je pre špeciálne pripojenie pre vysielače Spektrum
V tomto článku to nebudem detailnejšie rozoberať prijímače, dávam link na YouTube video, kde to je pekne vysvetlené:
odkaz na Youtube
FPV
FPV je skratka z First-person view - čo v preklade znamená pohľad z prvej osoby - čím sa myslí pohľad priamo z modelu.
Pre FPV potrebujeme:
- Kameru
- FPV Vysielač s anténou
- Prijímač s anténou
- Zobrazovaciu jednotku
Kamera
Existuje veľké množstvo kamier pre FVP. Kamery sa zvyčajne označujú počtom riadkov ktoré snímajú a zorným uhlom. Napríklad kamera Eachine CCD 700tvl 148 Degree Camera má 700 TV riadkov a zorné pole 148°. Čím viac riadkov má kamera, tak tým kvalitnejší je výsledný obraz,ale na druhej strane nemá význam kupovať kameru z vyšším počtom riadkov než dokáže display zobraziť.
Možno ste si všimli, že na koptery typu Racer dávajú 2 kamery: Jednu pomocou ktorej riadia koptéru a druhú na natáčanie videa. Ak vám teraz napadlo, že načo dávajú ľudia 2 kamery, keď väčšina kamerier má TV výstup - tak vám rovno odpoviem, že dôvodom je latencia obrazu. Latencia je opozdenie obrazu od momentu keď je obraz nasnímaný kamerou a zobrazený na display. Kamery typu Mobius, GoPro, SJCAM majú veľkú latenciu - t.j. opozdenie obrazu - kľudne sa môže stať, že kvôli opozdeniu obrazu na obrazovke vidíte, že koptére je ešte pred stromom, ale v skutočnosti už koptera napálila do stromu. To nie je dobrý stav. Ešte väčšiu latenciu majú kamery s WiFi prenosom. Kamery na FPV majú nízku latenciu a preto sa používajú na ovládanie.

FPV Vysielač s anténou
Vysielač je malá krabička, ktorá slúži na vysielanie TV obrazu nasnímaného kamerou. Pre vysielač sú podstatné nasledovné parametre:
-Frekvencia na ktorej vysiela - zvyčajne sa používa 5,8GHz, ale pre lepší prenos v budovách sa používa 1,2GHz, ale to sú už špeciálne vysielače
-Počet kanálov - zvyčajne sa používajú 8 alebo 32 kanálové vysielače. Na vysielači nastavíte kanál a potom ten istý kanál musíte naklikať na prijímači
-Vysielací výkon - výkon sa udáva v mW (mili Watoch). Čím vyšší výkon vysielača, tak tým z väčšej vzdialenosti môžeme prijať TV signál z koptéry. Štandardne sa vyrábajú 200mW a 600mW.
Pri frekvencii 5,8GHz treba dávať pozor na to, že signál je citlivý na prekážky medzi koptérou a prijímačom. Aj keby ste namontovali 600mW vysielač, a panelová stena by bola len 20metrov od vás, tak keď za ňu zaletíte, tak v momente vypadáva video signál. Na to treba dať pozor...
Dosah vysielača je možné zvýšiť aj kvalitnou anténou. Štandardne sa vysielač dodáva s lineárnou anténou (taká palička). Pri použití cirkulárnej antény (anténa vypadá ako hríbik) sa zvýši príjem a takáto anténa je menej náchylná na zmenu smeru koptéry. Odporúčam použivať cirkulárne antény.

Prijímač s anténou
Prijímač je krabička na prijímanie signálu z vysielača. Prijímač vyberáme podľa frekvencie vysielača - t.j. ak máme 5,8GHz vysielač, tak samozrejme aj prijímač musí byť pre túto frekvenciu. Na prijímači sa potom nastavuje kanál na ktorom má prijímať. Kanál sa skladá z písmena a čísla napr. A8. Ak na vysielači nastavíme A8, tak ten istý kanál nastavíme na prijímači. Ak kombinujeme vysielač a prijímač iných výrobcov, tak je potrebné skontrolovať či sú frekvencie pre rovnaké pre dané kanály. Nemusí to sedieť. Z prijímača vychádza TV out signál, ktorý sa priamo dá napojiť na LCD display alebo do okuliarov.
Aj signál na prijímači sa dá zlepšiť kvalitnou anténou. Tiež sa odporúča použiť cirkulárnu anténu (hríbik). Cirkulárne antény sú iné pre vysielač a prijímač. Pre prijímač treba použiť anténu s označením RX (receiver)

Zobrazovacia jednotka
Zobrazovacia jednotka slúži na zobrazenie obrazu z FPV kamery. Štandardne sa používajú malé LCD monitory alebo FPV okuliare.
Niektoré PFV monitory sa vyrábajú aj zo zabudovaným prijímačom. Ak máme taký monitor, tak iba pripojíme batériu, nastavíme frekvenciu a zobrazí sa obraz z kamery. Ak používame samostatný LCD monitor, tak sa výstup prijímača napája na vstup do LCD monitora. LCD monitor má CINCH vstup, čiže zapojenie je jednoduché.

Nevýhodou LCD monitora je zlá viditeľnosť za slnečného dňa. Tento problem riešia FPV okuliare. Pri výbere FPV okuliarov je potrebné dbať na 2 hlavné parametre:
- rozlíšenie monitora
- zorné pole (ang. FOV – field of view)
Rozlíšenie monitora
FPV okuliare sa vyrábajú v rozlíšeniach od 320x240 až po HD rozlíšenie. Čím väčšie je rozlíšenie, tak tým detailnejšie obraz vidíme. Pri rozlíšení 320x240 síce vidíte či je strom pred vami, alebo nie, ale moc ďaľších detailov nie. Odporúča sa mať minimálne 640x480.
Zorné pole (FOV)
Zorné pole je vlastne veľkosť obrazu akú vidíte po nasadení okuliarov. Veľa ľudí si myslí, že po nasadení okuliarov uvidí panoramatický obraz kde pohybom očí vidí obraz aj v pravo-vlavo aj hore a dolu. Žiaľ opak je pravdou. Po nasadení okuliarov uvidíte čiernu plochu, kde v strede obdĺžnik s obrazom. To, že aký veľký je obraz, určuje parameter FOV - zorné pole. FPV okuliare sa vyrábajú zo zorným polom od 25° do 46°. Aby sa to dalo predstaviť čo ten uhol znamená, skúsim vám prepočítať FOV na vzdialenosť od TV:
Dnešným štandardom je 40" TV. Nasadenie FPV okuliarov bude prezentovať ako keby ste vstúpili do úplne čiernej miestnosti kde na protiľahlej stene je pripevnená 40" TV na ktorej sa premieta obraz z kopéry. Ak máme FPV okuliare zo zorným polom 20°, tak obraz vidíme akoby sme stáli 2,5metra od TV. Ak máme FPV okuliare zo zorným polom 30° tak sa vzdialenosť skráti na 1,6m a pri 40° to už to je len 1,2m od TV.
Čiže ak máme okuliare s 320x240 a 20° zorným polom, tak vidíme málo detailov a ešte aj na malom obraze. Minimálnou požiadavkou na výber FPV okuliarov by malo byť rozlíšenie 640x480 a zorné pole 30°.

Okrem LCD monitorov a FPV okuliarov sa používa aj mačko-pes kde v plastovom head-sete je umiestnený LCD monitor. Fakt neviem ako to správne nazvať. Takéto okuliare riešia problém zo zlou viditeľnosťou obrazu za jasného dňa a pri tom to nestojí veľa. Nevýhoda je, že sa používa nekvalitná plastová optika a tak obraz je skreslený. To ani nie je optika ale zväčšujúci plastový panel. Ak by sa pre každé oko samostatná sklenená optika, tak výsledný pocit by bol o rád lepší.

Link: http://www.hobbyking.com/hobbyking/store/__53706__Quanum_DIY_FPV_Goggle_Set_with_Monitor_KIT_.html
Nejnovější články v kategorii Ostatní
Top 5 Eye Makeup Trends by Top Makeup Artist in BangaloreOnline Cricket ID for Live and Fantasy Games – Enroll Now
Online Cricket ID for Live and Fantasy Games – Enroll Now
Online Cricket ID for Live and Fantasy Games – Enroll Now
Online Cricket ID: From Fantasy Leagues To Live Matches
| Autor | Zpráva | |
|
AlbHert modelár 
Příspěvků: 25 Moje modely Poslat zprávu |
celkom gut, ale jednosmerak sa neriadi zmenou napatia, ale PWM. Dalo by sa povedat obmedzovanim mnozstva prudu za jednotku casu, pri konstantnom napati. |
|
|
mimimimik modelár 
Příspěvků: 783 Moje modely Poslat zprávu |
ano napatie je stale rovnake len sa sa meni sirka impulzu kedy je pusteny prud a kedy nie. Prepieha to tak rychlo ze motor sa plynule toci akurat ma mensi vykon tym padom aj otacky. |

- Přidat komentář